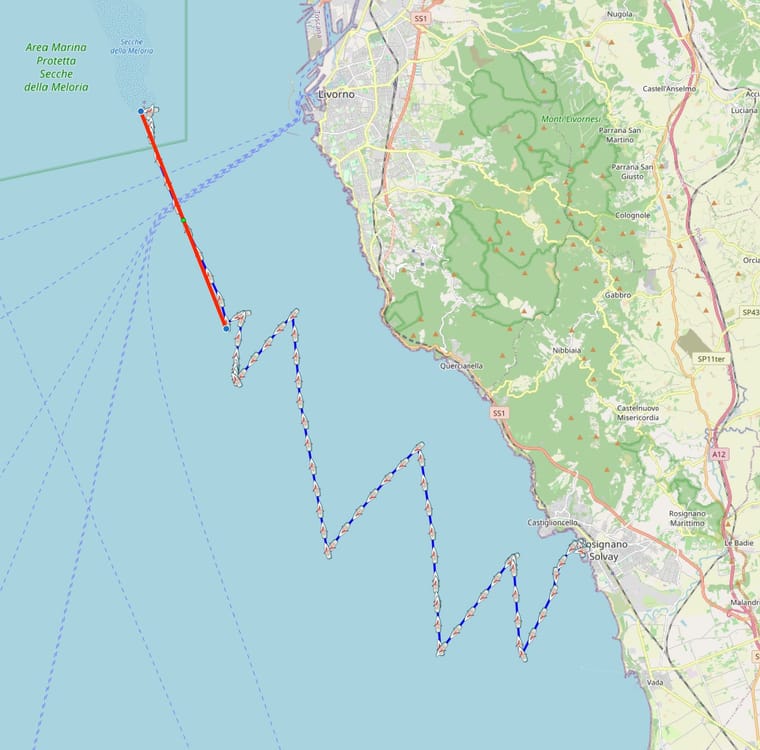
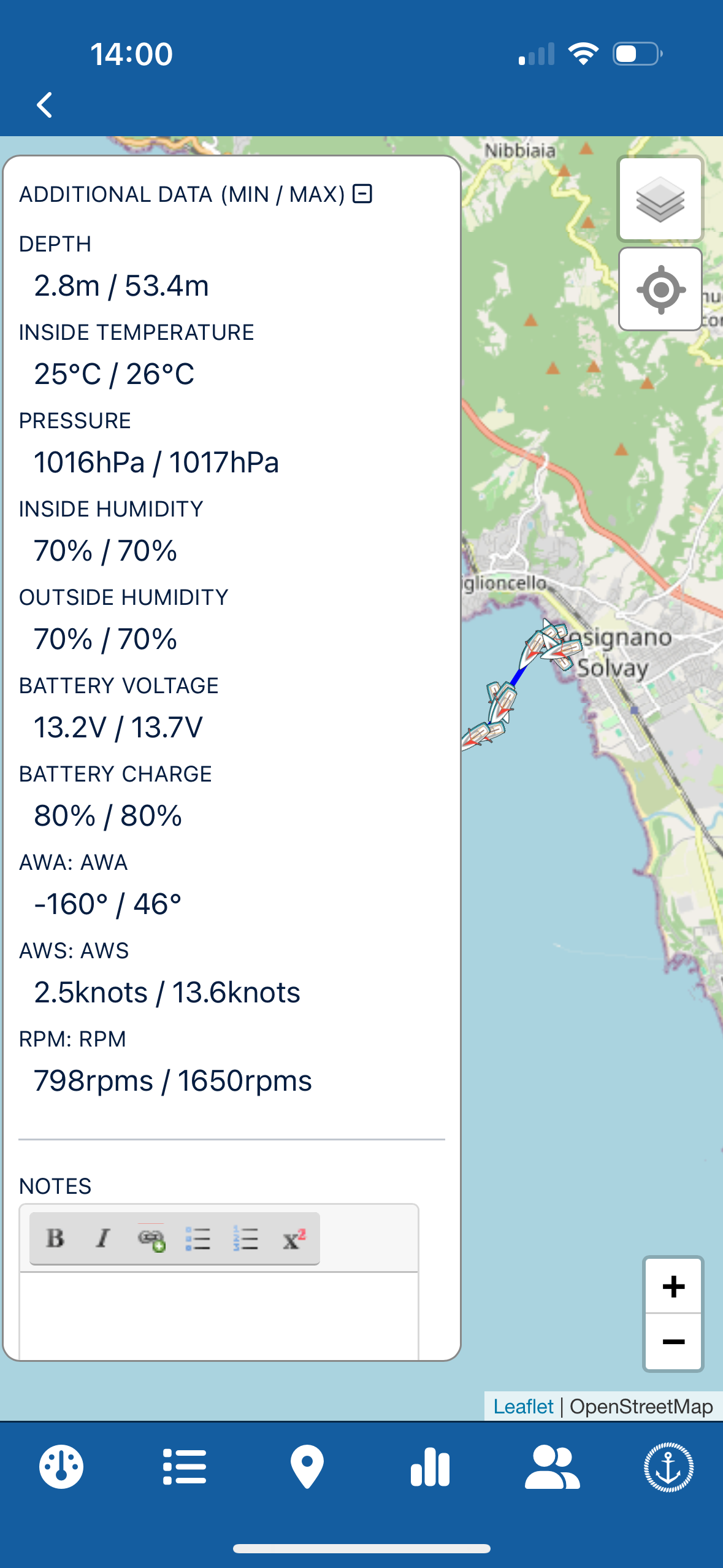
Like many sailors, I'm very careful to use the engine as little as possible, even when the wind is light (like in the Mediterranean Sea) or coming from the wrong direction compared to my destination. This is why I was one of the users who asked to be able to see the percentage of the route sailed versus the portion under power in the trip reports. I'd like to ask the developers, if possible, to color the portion of the route sailed differently from the portion under power, so I can immediately get a sense of the results. Would this be possible?